随着机器人在工厂、仓库、酒店、商场、餐厅等环境中的使用,移动机器人逐渐走进大众视野。机器人避障是实现机器人自主行走的根本,如果机器人在移动过程中不能快速、准确地对环境进行感知、测量,机器人很可能会与障碍物或人发生碰撞,造成经济损失或人身安全事故,但是机器人是如何实现自主形式完成避障的呢?
实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。
机器人避障使用的传感器多种多样,各有不同的原理和特点,目前常见的主要有视觉传感器、激光传感器、红外传感器、超声波传感器等。
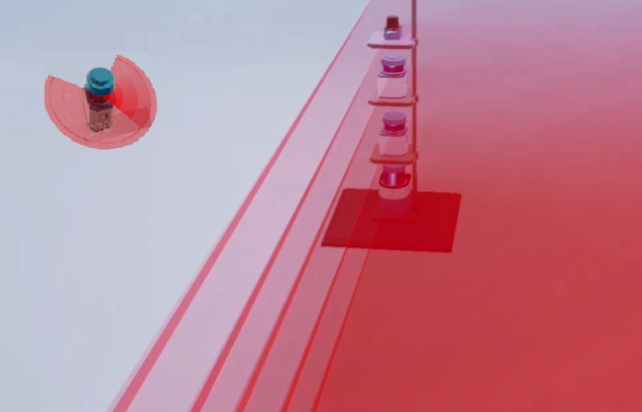
目前市面上常见的移动机器人避障,基本都采用到激光雷达(一种通过发射激光获取周围环境距离、反射强度等信息,来构建二维或三维场景的传感器),激光雷达与其它距离传感器相比,能够同时考虑精度要求和速度要求,这一点特别适用于移动机器人领域。此外,激光雷达不仅可以在有环境光的情况下工作,也可以在黑暗中工作,而且在黑暗中测量效果更好。
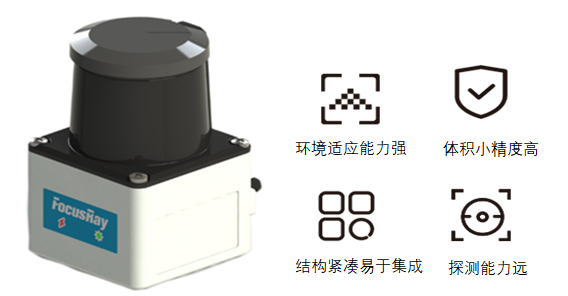
富锐光学C2系列高精度单线激光雷达,主要应用场景是机器人的导航和避碰。已在国内一流的机器人厂商完成测试并服务多年,凭借过硬的产品质量、稳定的交付以及专业的技术服务,已获得众多客户的一致好评。